Inclusive robotic foundation model (JST CRONOS)
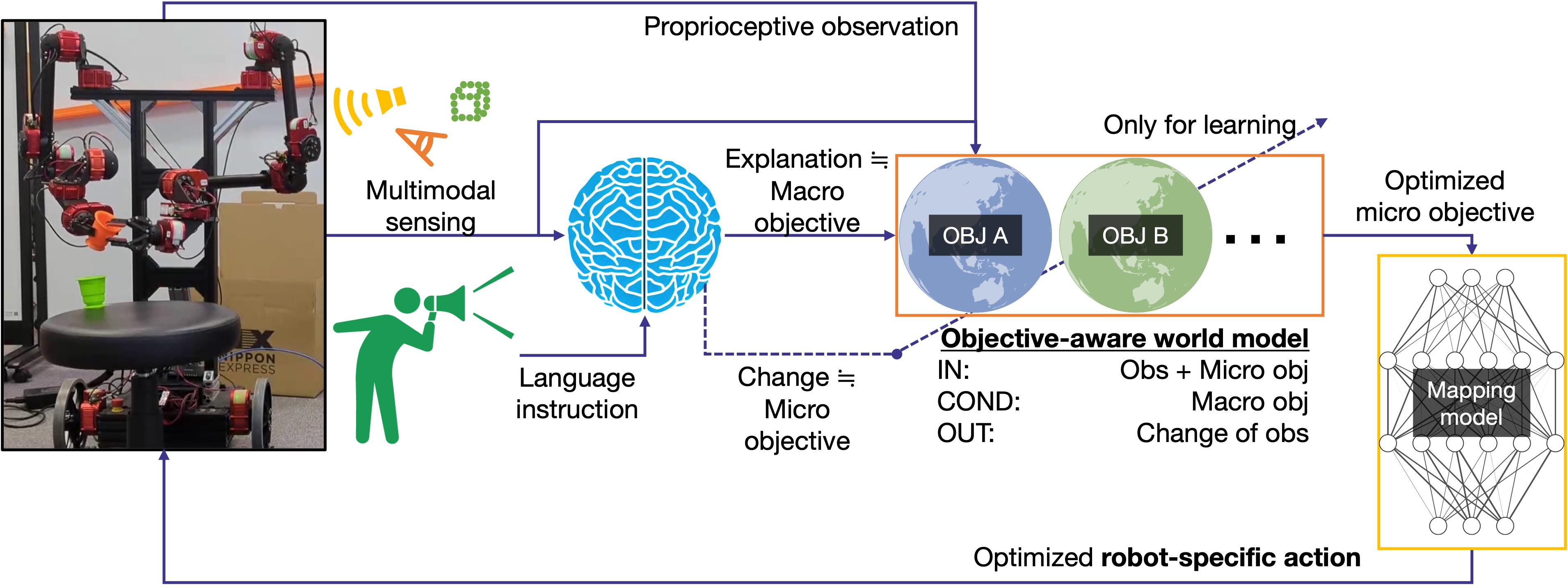
We develop a world model connected to a foundation model that can optimize the actions for various robots in response to language instrutions.
Mapping between latent action space common among robots and robot-specific action spaces
Lightweight hypernetworks that switch internal state representation according to language instrutions
Learning world model interpreted as multi-objective optimization
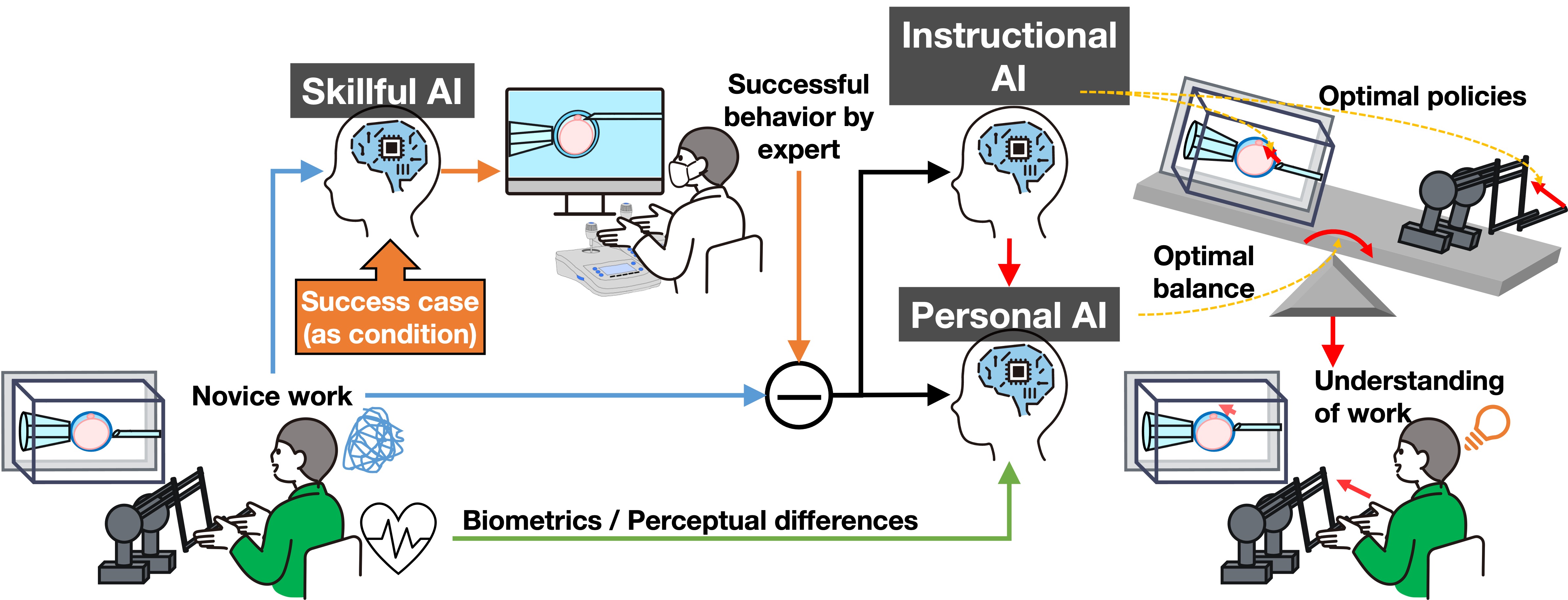
Skill-transfer AI model (JST K Program)
We develop three AI models that extract the skill differences between novice and expert learners and efficiently transfer the necessary skills to novice learners.
Extraction of skill differences by skillful AI model
Interface optimization for skill transfer through instructional AI model
Interface selection/balance based on biometrics/preference using personal AI model
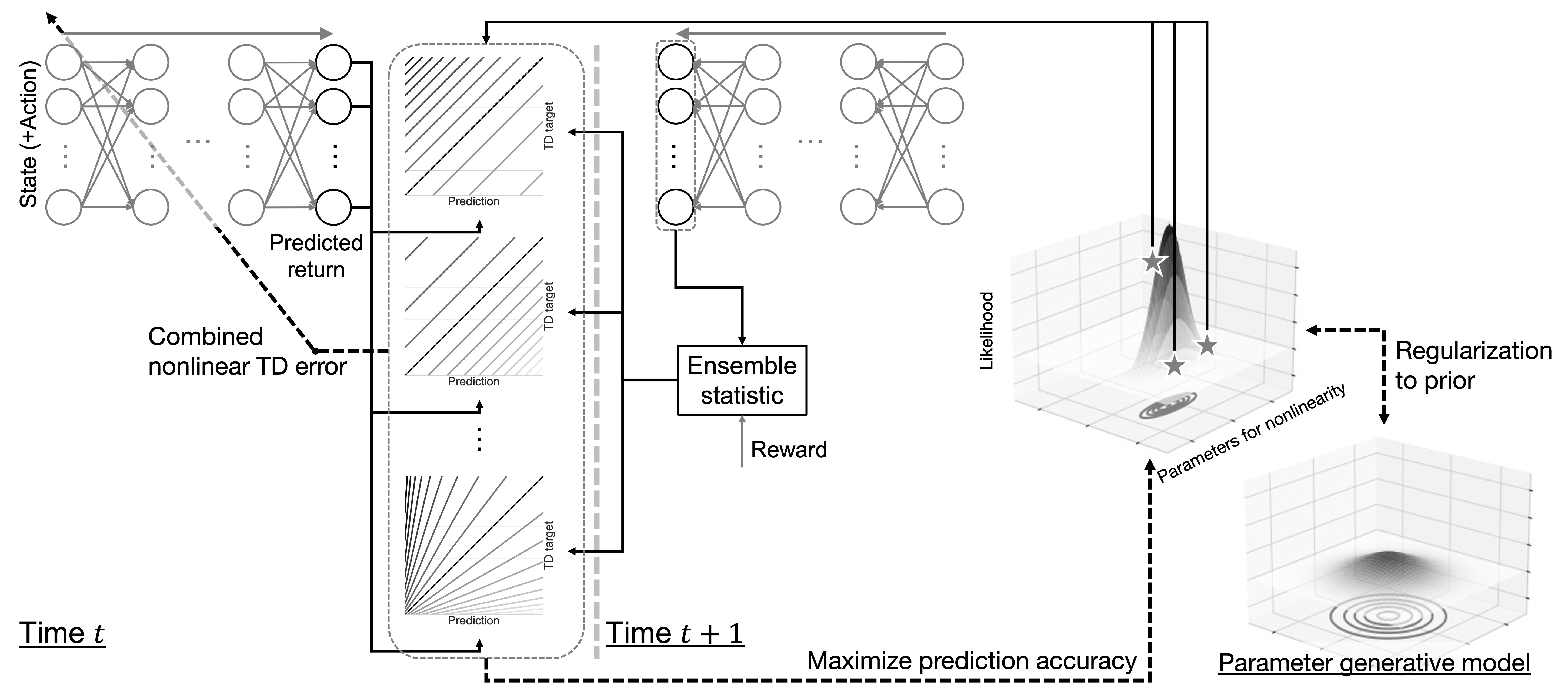
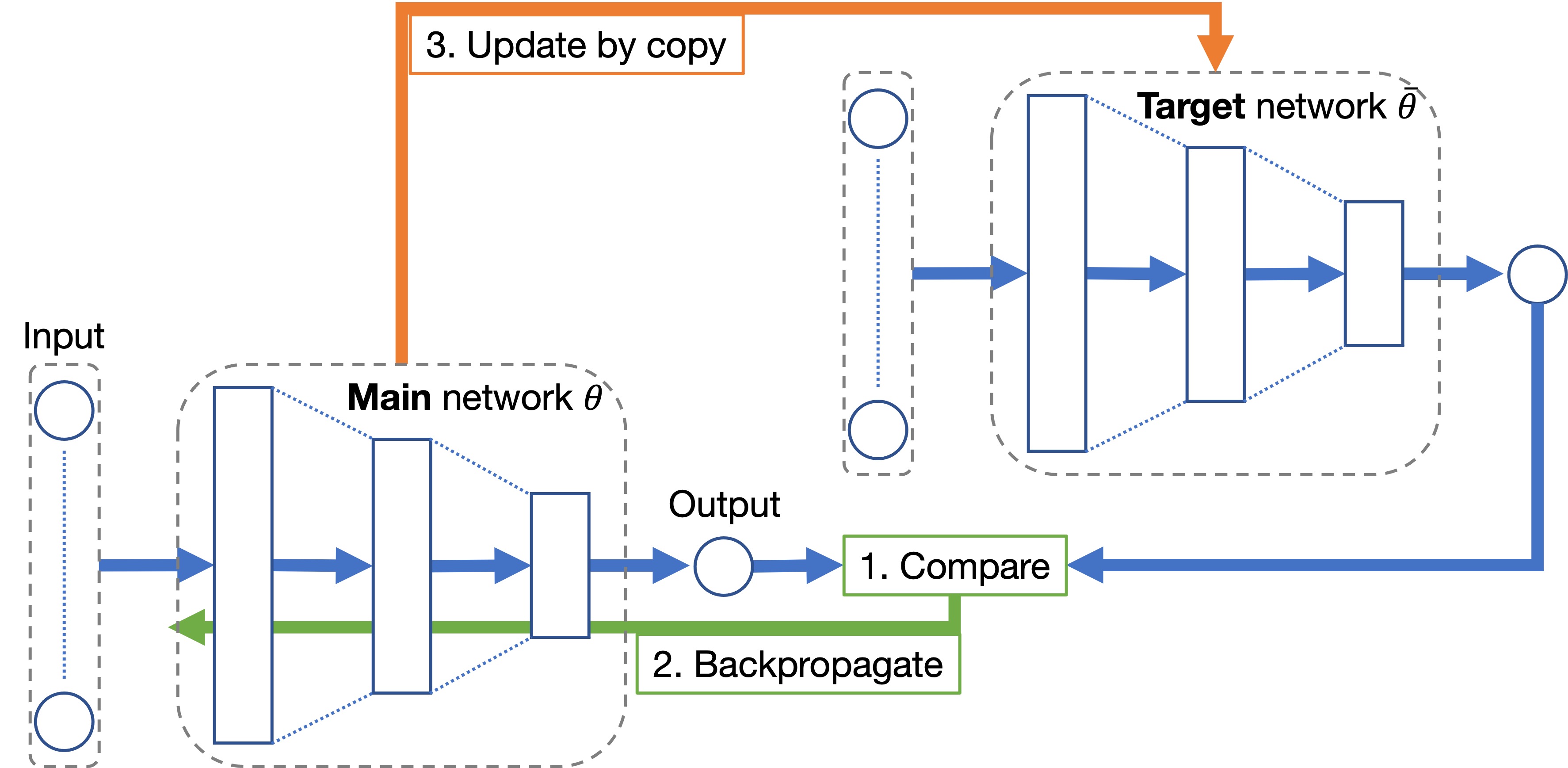
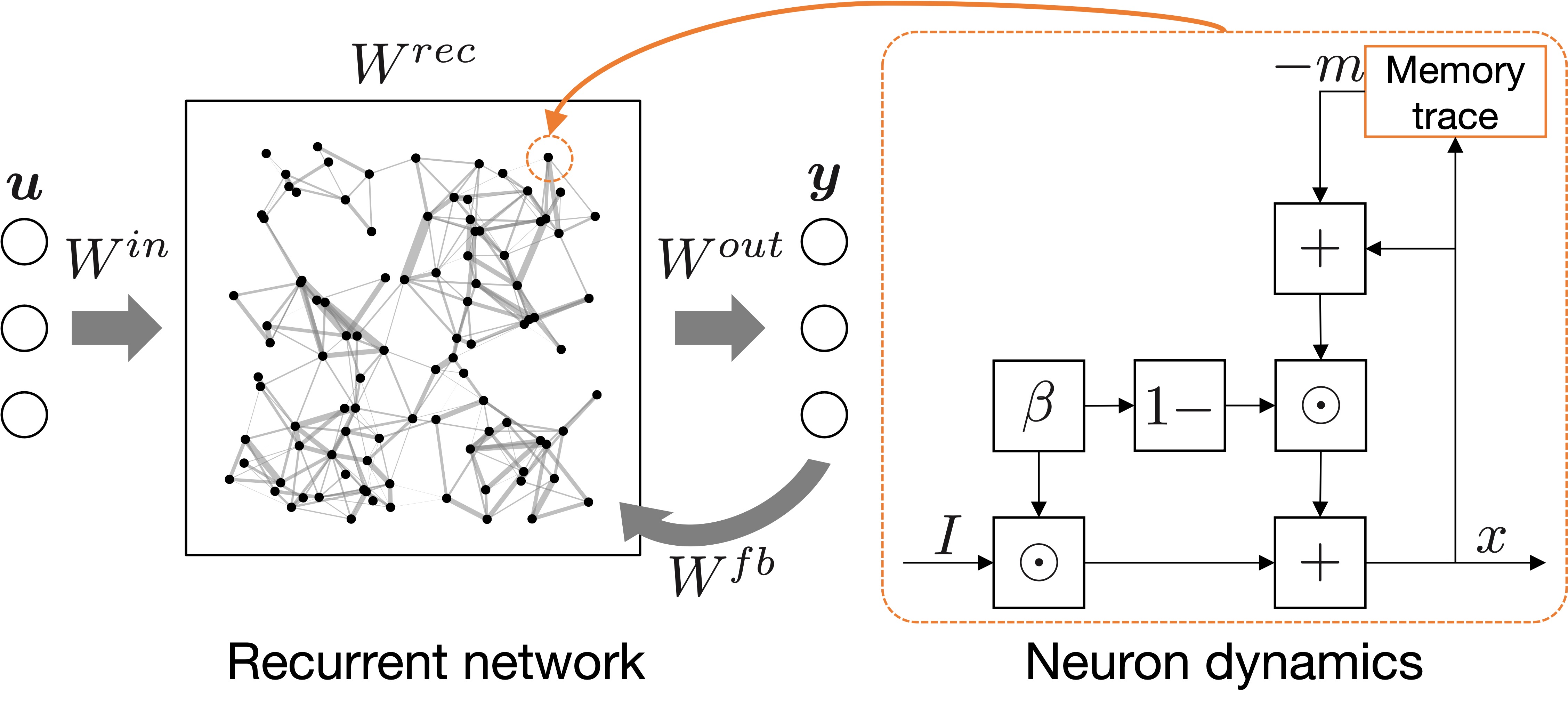
Reinforcement learning
Reinforcement learning as probabilistic inference
We derive and analyze various values that can be found by interpreting RL as a kind of probabilistic inference problem.
General representation of optimality and divergence
Optimization of discount factor according to events
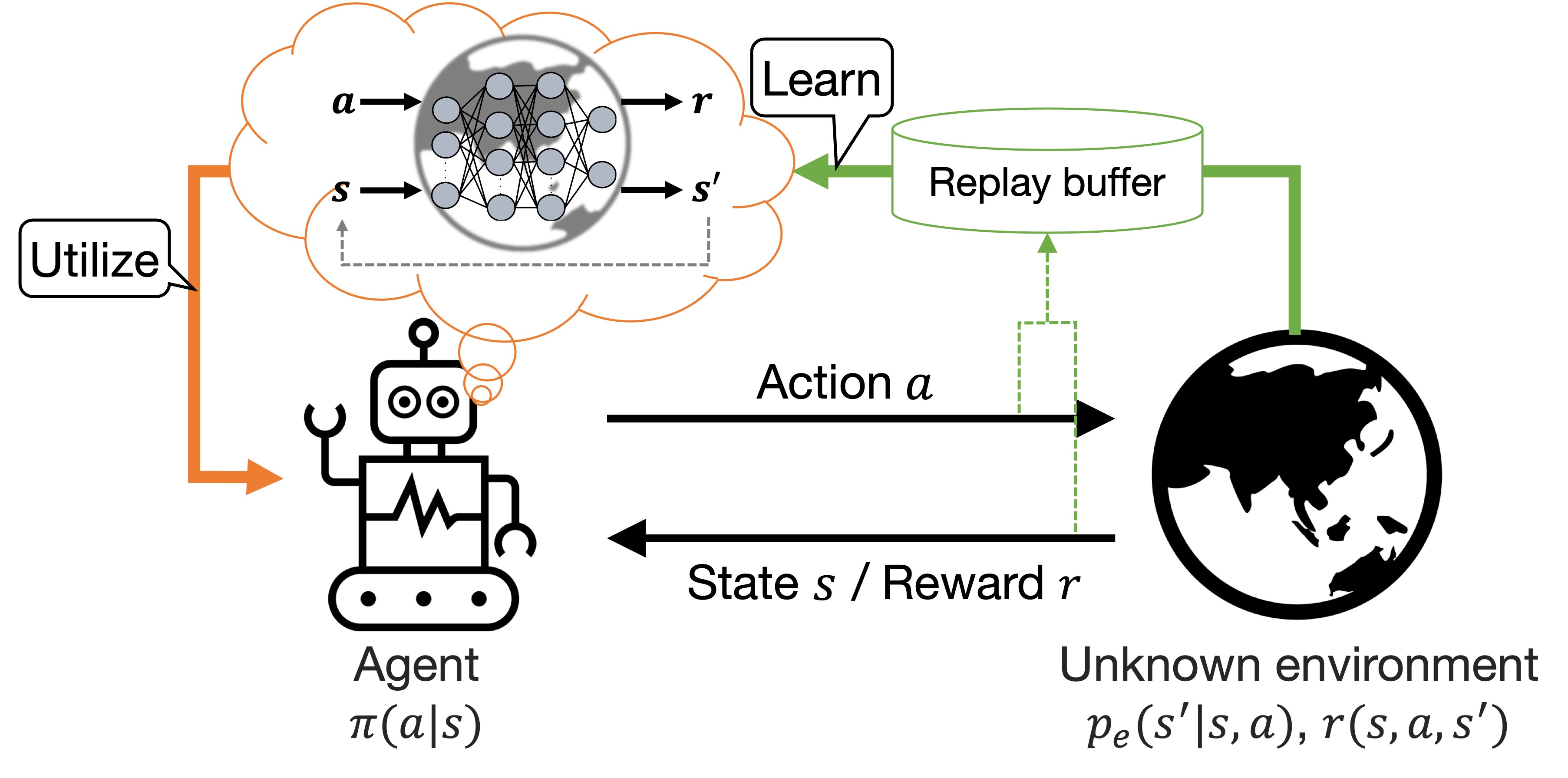
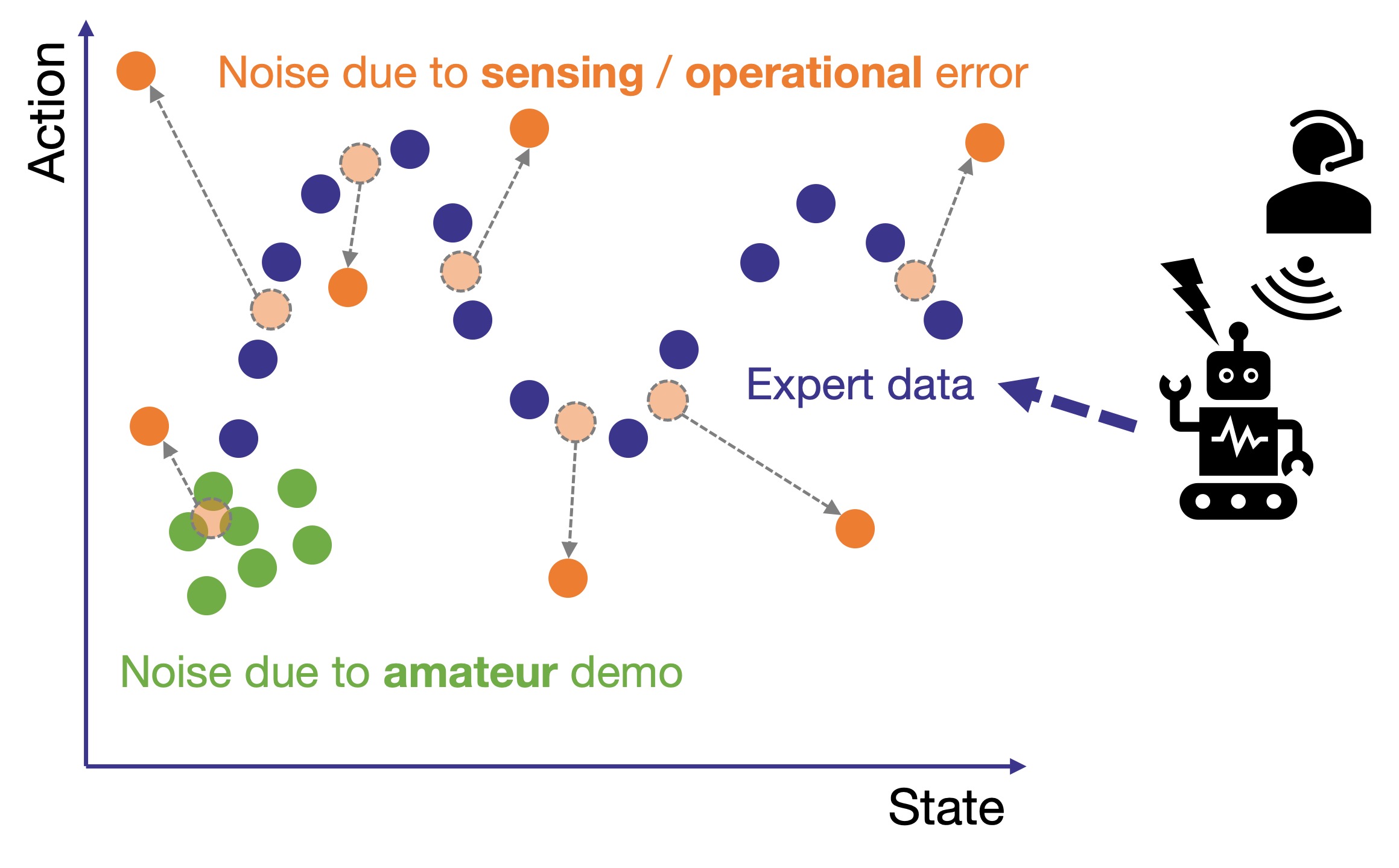
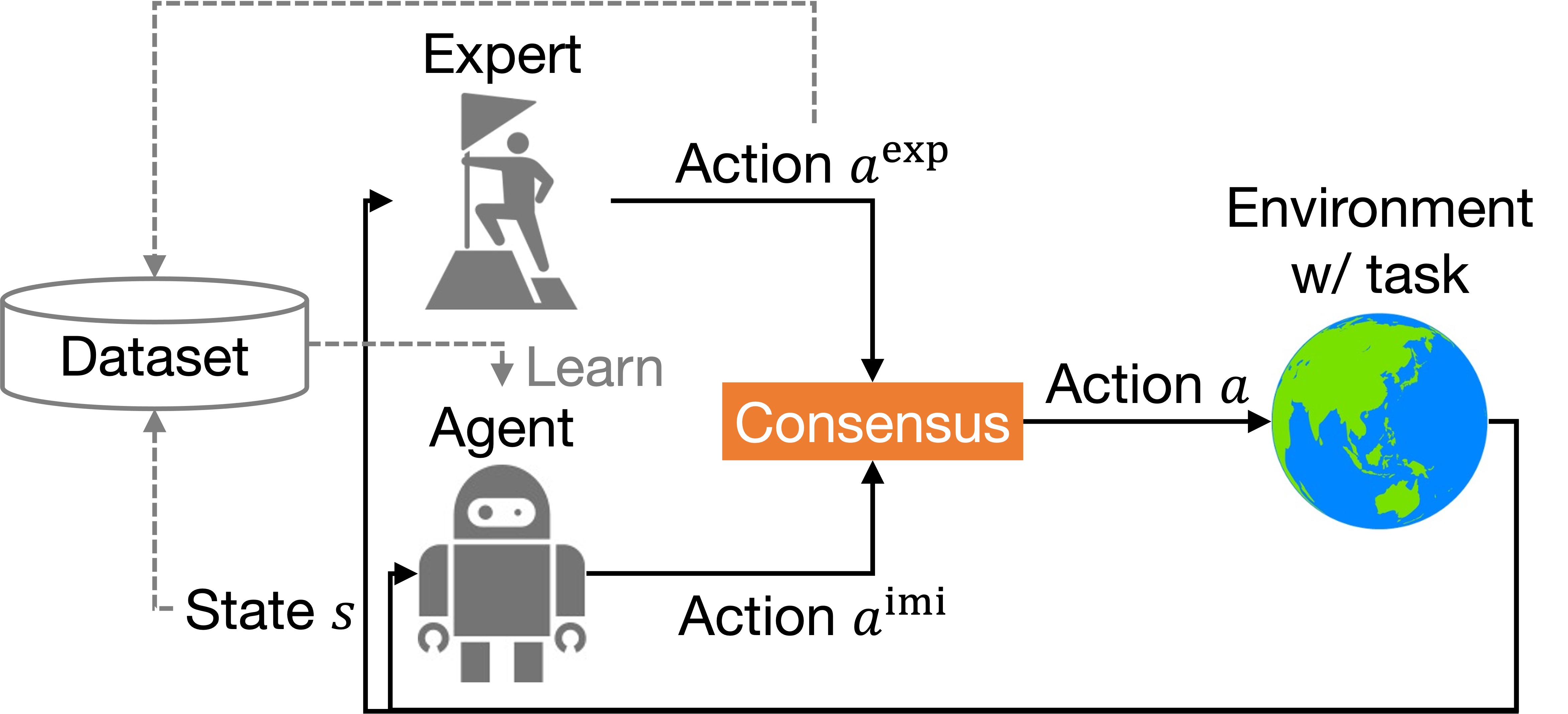
Utilization of imperfect demonstration
We develop imitation learning methodologies in the absence of sufficient quality, modality, and quantity of demonstration data.
Spatiotemporal partial imitation through self-paced learning